| ANASAYFA I PROJELER I İLETİŞİM |
|---|
OTOMATİK KABLO SALMA VE TOPLAMALLI ELEKTİRİKLİ SÜPÜRGE
Otomatik kablo salma ve toplamalı elektrikli süpürge ,kablo uzunluğunu kendi ayarlayarak sadece yeteri uzunlukta kabloyla çalışma imkanı veren, her model ve tasarımda süpürgelerde kullanılmak üzere tasarlanmış bir süpürgedir.
Değişik kurulumlarda elektrikli kablo mekanizmaları geliştirilmiştir.Çoğul olarak bu kablolar süpürgenin dışında bir yerde yer almaktadır ve elle sarılıp açılmaktadır.Ancak yaylı bir makaraya sarılarak kullanılan kablolar da tasarlanmıştır.Elektrikli süpürgelerin içerisinde yer alan bu kablolar makaradan çekilerek boşaltılmakta ve bu esnada kurulan yay mekanizması düğmeye basıldığında kablonun tekrardan sarılmasını sağlamaktadır.
Buluşta kullanılan şekillerin açıklamaları;
Şekil 1- Otomatik kablo salma ve toplamalı elektrikli süpürge
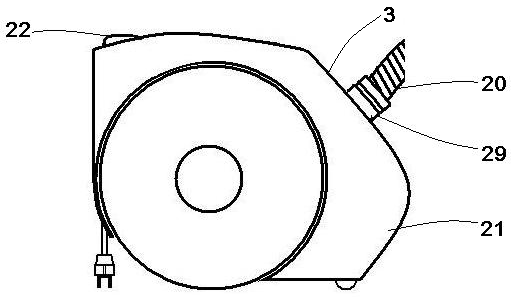
Şekil 2- Otomatik kablo salma ve toplamalı elektrikli süpürge arka görünüm
Şekil 3- Otomatik kablo salma ve toplamalı elektrikli süpürge kasnak kurulumu
Şekil 4-Göbekten motorlu kasnak
Şekil 5- Dıştan motorlu kasnak
Şekil 6- Dıştan motorlu yaylı kasnak
Şekil 7-Rediktörlü kasnak
Şekil 8-Göbekten dişli kasnak
Şekil 9- Dişli kasnak kurulumu
Şekil 10- Yaylı kablo kontrol kollu otomatik kablo salma ve toplamalı elektrikli süpürge yan görünümü.
Şekil 11- Yaylı kablo kontrol kolu ön görünümü.
Şekil 12-Körüklü flanşlı tahrik aparatı
Şekil 13- Flanşlı tahrik aparatı
Şekil 14- Bölüntülü tahrik aparat
Şekil 15- Kuvvet sensörlü portatif süpürge boru ara eklem aparatı
Şekil 16- Flanşlı tahrik aparatı.
Şekil 17- Flanşlı tahrik aparatı.
Şekil 18- Süpürge kolu kablo açma- sarma düğmesi
Şekil 19- Yaylı açma kapama aparatı
Şekil 20-Kablo yönlendirme aparatının süpürgede konumu
Şekil 21-Kablo makarasının süpürgede konumu
Şekil 22-Kablo yönlendirme aparatı
Şekillerdeki parçalar tek tek numaralandırılmış olup, bu numaraların karşılığı aşağıda verilmiştir.
1-Elektrik motorlu kasnak
2-Elektrikli kablo salma ve sarma motoru
3-Süpürge şasesi
4-Motor dişli
5-Kasnak dişlisi
6-Kanat mili
7-Kablo destek kanadı
8-Mil yuvası
9-Rulman
10-Kablo sarma yay kutusu
11-Vida
12-Elektrik kablosu
13-Motor haznesi
14-Redüktörlü motor
15-Redüktör
16- Kasnak dişlisi
17- Dişli
18-Körük
19-Kasnak mili
20-Hortum
21- Otomatik kablo salma ve toplamalı elektrikli süpürge
22-Kablo salma düğmesi
23-Yaprak yay
24- Kablo toplama düğmesi
25-Fiş haznesi
26- Kablo destek kanadı yayı
27-Flanşlı tahrik aparatı
28-Kablo
29-Flanşlı tahrik aparatı sabitleme düzeneği
30- Helezon yay
31- Flanşlı tahrik aparatı elektrik devresi
32- Flanşlı tahrik aparatı sabitleme düzeneği elektrik aktarma devresi
33- Veri ve güç aktarım soketi girişi
34-Helezon yay yuvası
35-Yaprak yay yuvası
36-Dişli sabitleme pimi
37-Dişli motor mili yuvası
38-Rubleli kasnak dişlisi
39-Rubleli motor dişlisi
40- Flanşlı tahrik aparatı borusu
41- Kablo sarma-açma düğmesi
42- Süpürge borusu
43- Elektronik kontrol ünitesi
44-Batarya
45-Elektrikli motor
46-Bağımsız makara
47-Elektrik motoru makarası
48-Kablo kuvvet senSörü
49-Sabitleme mili
50-Sabitleme mili yuvası
51- Yaylı açma kapama aparatı
52- Yaylı tahrik aparatı kolu
53- Bölüntülü tahrik aparatı kuvvet sensörü
54-Bölüntülü tahrik aparatı
55- Bölüntülü tahrik aparatı sabitleme düzeneği
56-Hava muhafaza kanadı
57- Hava muhafaza kanadı yuvası
58- Bölüntülü tahrik aparatı borusu
59-Veri ve güç aktarım soketi
60-Süpürge giriş borusu
61-Portatif kuvvet sensörü
62-Portatif kuvvet sensörü hortum giriş borusu
63-Kuvvet sensörü
64- Portatif kuvvet sensörü süpürge giriş borusu
65-Makara kuvvet sensörü
66-Makara yaylı açma kapama düğmesi
67-Hareket sensörü
68-Mesafe sensörü
69-Motor kuvvet sensörü
70-Kablo ikaz hoparlörü
71-Yaylı kablo kontrol kolu
72-Kablo kontrol kolu yayı
73-Yaylı kablo kontrol kolu mili
74-Yaylı kablo kontrol mili sabitleme aparatı
75-Komut kolu
76-Elektronik güç kontrol kolu kartı
77-Yaylı kablo kontrol kolu makarası
78-Kablo yönlendirme aparatı
79-Kablo makarası
Otomatik kablo salma ve toplamalı elektrikli süpürge (21),mevcut elektrikli süpürgelerden farklı bir işleyişe sahiptir.Süpürgenin çekilmesi veya hareket ettirilmesiyle süpürge kablosu otomatik olarak salınarak bir hareket özgürlüğü sağlanmakta ve dolayısıyla bir kablo karmaşasına yol açmadan süpürme işlemi gerçekleşmektedir. Mevcut sistemlerde süpürülecek alanın genişliğine bağlı olarak, kablo elle çekilerek veya açılarak hazır hale getirilmekte ve kablolar bütün olarak ortalık yerdeyken veya açıkken bu işlem gerçekleştirilmektedir.Oysa otomatik kablo salma ve toplamalı elektrikli süpürgede (21) kablolar sadece süpürülecek alanın genişliği kadar dışarı salınmakta ve fazlası geri sarılmakta,kablo uzunluğu sürekli kontrol edildiğinden süpürme işlemine çok daha hızlı geçilebilirken ,işlemin tamamlanıp süpürgenin kaldırılması da bir o oranda hızlı olmaktadır.
Sistem,elektrik motorlu kasnak (1), elektrikli kablo salma ve sarma motoru (2),süpürge şasesi (3),motor dişli (4),kasnak dişlisi (5),kanat mili (6),kablo destek kanadı (7),mil yuvası (8),rulman (9),kablo sarma yay kutusu (10),motor haznesi (13),redüktörlü motor (14),redüktör (15),kasnak dişlisi (16),dişli (17),körük (18),kasnak mili (19),kablo salma düğmesi (22),yaprak yay (23),kablo toplama düğmesi (24),kablo destek kanadı yayı (26),flanşlı tahrik aparatı (27),flanşlı tahrik aparatı sabitleme düzeneği (29),helezon yay (30),flanşlı tahrik aparatı elektrik devresi (31),flanşlı tahrik aparatı sabitleme düzeneği elektrik aktarma devresi (32),helezon yay yuvası (34),yaprak yay yuvası (35),dişli sabitleme pimi (36),dişli motor mili yuvası (37),rubleli kasnak dişlisi (38),rubleli motor dişlisi (39),flanşlı tahrik aparatı borusu (40), elektronik kontrol ünitesi (43),batarya (44),elektrikli motor (45),bağımsız makara (46),elektrik motoru makarası (47),kablo kuvvet sensörü (48),sabitleme mili (49),sabitleme mili yuvası (50), yaylı açma kapama aparatı (51), elektrik açma kapama aparatı kolu (52), bölüntülü tahrik aparatı kuvvet sensörü (53),bölüntülü tahrik aparatı (54),bölüntülü tahrik aparatı sabitleme düzeneği (55),hava muhafaza kanadı (56),hava muhafaza kanadı yuvası (57) ,bölüntülü tahrik aparatı borusundan (58),veri ve güç aktarım soketi (59),süpürge giriş borusu (60),portatif kuvvet sensörü (61),portatif kuvvet sensörü hortum giriş borusu (62),kuvvet sensörü (63) , portatif kuvvet sensörü süpürge giriş borusu (64),makara kuvvet sensörü (65),makara yaylı açma kapama düğmesi (66),hareket sensörü (67),mesafe sensörü (68),motor kuvvet sensörü (69), kablo sarma-açma düğmesi (41), kablo ikaz hoparlörü (70),yaylı kablo kontrol kolu (71),kablo kontrol kolu yayı (72),yaylı kablo kontrol kolu mili (73),yaylı kablo kontrol mili sabitleme aparatı (74),komut kolu (75), elektronik güç kontrol kolu kartı (76),kablo yönlendirme aparatı (78) ve kablo makarasından (79)
meydana gelmektedir.
Otomatik kablo salma ve toplamalı elektrikli süpürge (21),kablo uzunluğunu kendi ayarlayarak sadece yeteri uzunlukta kabloyla çalışma imkanı veren bir mekanizmaya sahiptir.Sistem, elektrik motorlu kasnağı (1) çeviren bir elektrikli kablo salma ve sarma motoru (2) sensör (48,53,65,67,68,69) veya devrelerden (31,32) aldığı komutlarla kabloların ileri veya geri sarılması esasına göre çalışmaktadır.Kablo salma ve toplama işlemi süpürgenin (21) hareket ettirilmesinin hemen ardından başlamaktadır.Süpürge üzerinde bulunan hareket sensürü (67) süpürgenin hareket ettirilmesiyle elektronik kontrol ünitesine (43) motorun kasnağı çevirme komutunu vermekte ve kablonun belli bir uzunlukta salınma işlemi gerçekleşmektedir.Kablo,süpürgenin hareket ettirilmesi esnasında mesafe sensörünün (68) ölçtüğü yol kadar salınmaktadır ancak kablo mesafe sensörü (68) olmaksızın, süpürge her hareket ettirildiğinde kablo belli bir uzunlukta da salınabilmektedir. Kablo salma işlemi hareket sensörünün (67) verdiği komutlarla gerçekleşmektedir ve bu komutlar kablo kuvvet sensörünün (48) devreye girmesiyle de işler hale gelebilmektedir.Belli bir baskıda kablo sarma işlemini durduran kablo kuvvet sensörü (48) aynı zamanda hareket sensörünün (67) de açılıp kapanmasını sağlamaktadır.Hareket sensörü (67) , kablo kuvvet sensörünün (48) kablo sarma işlemini durdurduğunda devreye girmekte ve kablo salma işlemi gerçekleşmektedir.Diğer bir deyişle kablo belli bir gerginliğe geldiğinde ve kuvvet sensürü (48) devreye girip kablo sarma işlemini durdurduğunda hareket sensörü (67) kablonun salınma komutunu vermektedir.Aynı şekilde motor kuvvet sensörü (69) de benzer bir işleve sahiptir.Motor kuvvet sensörü (69) belli bir gerginliğe kadar kablonun sarılmasına izin vermekte ve sonrasında sarma işlemi durdurularak hareket sensörünün (67) kabloyu salma komutunun verilmesine izin vermektedir.Kablonun belli oranda salınarak durmasının ardından kablo sarma komutu hemen bu işlemin ardından başlamakta ve belli bir gerginliğe kadar elektrik motorlu kasnağa (1) sarılarak her seferinde tekrarlanmaktadır.
Otomatik kablo salma ve toplamalı elektrikli süpürge de kablonun açılma veya sarılma işlemi kablo gerginliğine bağlı olarak ta çalışabilmektedir.Süpürgenin her çekilip bırakılmasında süpürge kablosunun gerginliği sürekli olarak değişmekte ve kablonun gerginliğine göre kablo salınmakta veya sarılmaktadır.Kablonun en gevşek halinde veya yaylı kablo kontrol kolunun (71) en aşağıda olduğu durumda ,birinci konumdayken kablonun sarılma komutu verilmektedir.Kablolar sarılıp belli bir gerginliğe gelmesinin ardından yaylı kablo kontrol kolu (71) gerilen kablo tarafından otomatik olarak bir nebze yukarı kaldırılmaktadır ve ikinci aşamada devre açılarak kablonun sarılma komutu durdurmaktadır.Sarımın durdurulup süpürgenin çekilmesiyle gerginleşen kablo ,yaylı kablo kontrol kolunu (71) daha da yukarı kaldırmakta,üçüncü aşamada devre tekrardan kapatılarak kablonun salınma işlemi başlatılmaktadır.Yaylı kablo kontrol kolu (71) kablonun gerginliğine bağlı olarak kabloların değişik hızlarda dışarı salınmasını sağlamaktadır.Kabloların sarılma veya açılma işlemi yaylı kablo kontrol koluyla (71) eşgüdümlü olarak hareket eden ve ona bağlı olarak hareket eden komut kolunun (75) elektronik güç kontrol kolu kartı (76) üzerindeki konumuna göre gerçekleşmektedir.Dolayısıyla süpürge ne hızda çekilirse çekilsin, komut kolu (75) kablonun gerginliği oranında elektronik güç kontrol kolu kartı (76) üzerinde kaymakta ve kablo bir o oranda dışarı salınmaktadır.Yaylı kablo kontrol kolu (71) bir mille (73) yaylı kablo kontrol mili sabitleme aparatına (74) sabitlenmiştir ve bir yay (72) tarafından kabloya doğru sürekli olarak bastırılmaktadır.Yaylı kablo kontrol kolu (71) elektronik kontrol ünitesine bağlıdır ve buradan alınan veriler elektrikli kablo salma ve sarma motoruna iletilerek ileri veya geri sarılmaktadır.
Otomatik kablo salma ve toplamalı elektrikli süpürgede kablo (12) belli bir uzunluğa kadar salınmakta, elektrik motorlu kasnağın (1) tabanında bulunan ve kablo tarafından sarılma esnasında bastırılarak devrenin kapatılmasını sağlayan makara kuvvet sensörü (65) ve makara yaylı açma kapama düğmenin (66) boşa çıkmasıyla kablo salma işlemi otomatik olarak durmaktadır.Kablo tarafından baskılanan makara kuvvet sensörü (65) ve makara yaylı açma kapama düğmesi (66) kablolar bütünüyle boşaldığında devreyi açmakta ve motorun kabloyu açma yönündeki çevirme işlemi engellemektedir.
Otomatik kablo salma ve toplamalı elektrikli süpürge (21),süpürge hortumuna (20) uyğulanan çekme kuvvetine göre de çalışabilmektedir.Flanşlı tahrik aparatına (27) giren süpürge hortumu (20) ileri doğru çekildiğinde ,tahrik aparatı üzerinde (27) bulunan flanşlı tahrik aparatı elektrik devresi (31) , flanşlı tahrik aparatı sabitleme düzeneği elektrik aktarma devresiyle (32) tamasa geçmekte ve devrenin kapatılmasıyla belli oranda elektrik motorlu kasnaktan (1) kablo salınma işlemi gerçekleşmektedir.Hortum (20) bırakıldığında ise bir yay (30) tarafından geri itilen flanşlı tahrik aparatı (27) devreyi açtığından kablo salma işlemi durmakta, elektrik motorlu kasnak (1) üzerinde bulunan ve kablo salma işlemi esnasında kurulan kablo sarma yayı(10) devreye girerek kablonun elektrik motorlu kasnağa (1) tekrardan sarılmasını sağlamaktadır. Kablo sarma yayı(10) kabloyu beli bir gerginliğe kadar ve sabit bir hızda sarmaktadır.Kasnak ve motor mili üzerinde bulunan rubleli kasnak dişlisi (38) ve rubleli motor dişlisi (39) kasnağın sadece bir yönde dönmesinde etkilidir ve aksi yönde boşa dönerek kablolar,kablo sarma yayının (10) gücüyle elektrik motorlu kasnağa (1) sarılmaktadır.Ancak kabloların sarılma işlemi sadece kablo sarma yayıyla (10) değil , elektrikli kablo salma ve sarma motoruyla (2) da sarılabilmektedir. Hortum bırakıldığında bir yay (30) tarafından geri itilen flanşlı tahrik aparatı devreyi kapattığından kablo salma işlemi durmakta ve hemen ardından elektronik kontrol ünitesinden (43) motora (2) verilen bir komutla kablo belli bir gerginliğe kadar sarılmakta ve sarma işlemi durdurulmaktadır.Burada her iki yönde de dönmeye izin veren motor dişlisi (4) ve kasnak dişlisi (5) kullanılmıştır (Şekil 5).Kabloların geri sarılma işlemi yaylı açma kapama aparatından da (51) gerçekleşebilmektedir.Kablo salma işleminin durmasının hemen ardından bir komutla geri sarılan kablolar belli bir gerginliğe ulaştığında elektrik açma kapama aparatı kolunu (52) yukarı doğru itmekte ve kolun yukarı doğru itilmesiyle kapattığı devreyle birlikte sarma işlemi durmaktadır.
Kablonun salınma işlemi bölüntülü tahrik aparatıyla (54), bölüntülü tahrik aparatı sabitleme düzeneği (55) arasında bulunan sensöre (53) uyğulanan kuvvetle de harekete geçebilmektedir.Süpürge hortumunun çekilmesiyle arada kalan sensör (53) sıkıştırılmakta ve verilen komutla kablonun salınma işlemi gerçekleşmektedir.Aynı şekilde süpürge hortumu bırakıldığında elektronik kontrol ünitesinden (43) motora (2) verilen bir komutla kablolar tekrardan belli bir gerginliğe kadar kasnağa sarılarak kablo boşluğu giderilmektedir.
Kablo salma işlemi kablonun (12) kablo kuvvet sensörüne (48) uyğuladığı kuvvetle de harekete geçebilmektedir.Süpürgenin ileri doğru çekilmesiyle kablo belli bir gerginlige geldiğinde kablo kuvvet sensörünü (48) tetiklemekte ve kablo salma işlemi gerçekleşmektedir.Kablonun boşa çıkmasıyla tekrardan kablo belli bir gerginliğe kadar sarılarak toplanmaktadır.
Kablo sarma işleminin durdurulması kablonun kablo kuvvet sensörüne (48) uyğuladığı kuvvetle de geçekleşebilmektedir.Elektrikli süpürgenin ileri doğru çekilmesiyle kablo belli oranda salınmakta ve hemen ardından elektronik kontrol ünitesinden (43) verilen bir komutla tekrardan sarılmaktadır.Sarılma işlemi neticesinde belli bir gerginliğe ulaşan kablo,kablo kuvvet sensörüne (48) baskı yapmakta ve bu baskı neticesinde sarma işlemi durmaktadır.
Otomatik kablo salma ve toplamalı elektrikli süpürge,sadece kablo salan modeliyle de kullanılabilir bir özelliktedir (Şekil 1).Süpürgenin ileri doğru çekilmesi veya hareket ettirilmesiyle kablo sadece salınmakta geri sarılmamaktadır.Kablonun geri sarma işlemi ise süpürge üzerinde bulunan kablo toplama düğmesine (24),basılarak veya kablo açma ve sarma düğmesi (41) ,kullanılarak elektrikli motorla (2) da yapılabilmektedir.
Otomatik kablo salma ve toplamalı elektrikli süpürgede kablo,dışarıdan bir müdahaleyle kişisel olarak ta açılabilmektedir. Sürekli olarak şarj edilen bir bataryadan (44) güç alan ve kablonun salınmasını sağlayan kablo sarma-açma düğmesi (41) ve kablo salma düğmesine (22) basılarak motor kasnağı çevirmekte ve istenilen bir oranda kablo salınmakta veya sarılmaktadır.
Otomatik kablo salma ve toplamalı elektrikli süpürge,rediktörlü (47) motor(48),motor (48) ve merkezinde dişliler (16,17,18) bulunan elektrik motorlu kasnağı (1) çevirmesiyle işler hale gelmektedir. Kasnağın iç kısmında bulunan ve pimlerle (36) tutturulan dişliler (16,17,18) bir elektrikli motor (48) vasıtasıyla dön derilerek kabloların salınma veya sarılma işlemi gerçekleştirilmektedir.
Kabloların sarılma işlemi ,bağımsız makara (46) ve elektrik motoru makarasının (47), kasnağı çeviren motorla eşgüdümlü bir şekilde çalışmasıyla da gerçekleşebilmektedir.Kabloların sarılma veya salınma komutuyla birlikte,kasnağı çeviren motorla (48) , elektrik motoru makarası (47) eşgüdümlü bir şekilde dönek kablo toplanmakta veya açılmaktadır. Kablolar mesafe sensörünün (68) belirlediği uzunlukta salınabildiği gibi ,her çekme veya hareket ettirildiğinde belirlenen bir oranda da dışarı salınabilmektedir.
Di Sanat Atölyesi sanatsal etkinliklerin yanı sıra endüstriyel tasarım ve ürün geliştirmeye yönelik faaliyetleriyle de çalışmalarını sürdürmekte,bir çok patent başvurusu ve yine bu başvurulara ilişkin hazırladığı iş planları ve yenilikçi iş fikirleriyle arayışlarını devam ettirmektedir.Çok daha fazla proje için lütfen arayınız veya mesaj atınız.
| michelangelo | leonardo da vinci | kazimir maleviç | ayvazovski | van gogh | ivo andrıc | helena blavatsky |
|---|
İLETİŞİM
05375201947
bilgi@disanat.com
disanat@gmail.com
![]()
İsmet
DEMİRHAN
![]()
H.Ü
Güzel Sanatlar
Fakültesi
1998
copyright © 2014 disanat.com
,